[Program Synthesis #8] Bidirectional Search: Top-down과 Bottom-up의 결합
Program Synthesis 시리즈 8편 – Top-down과 Bottom-up 탐색을 결합하여 search space를 효과적으로 줄이는 Bidirectional Search 이해하기
들어가며 — 두 방향에서 동시에 탐색하기
지금까지 우리는 Program Synthesis를 다양한 관점에서 살펴봤다.
- Enumeration → 가능한 프로그램 생성
- Pruning / Prioritization → 탐색 효율 개선
- Representation → 프로그램 공간을 압축
이제 남은 질문은 이것이다.
탐색을 더 빠르게 만들 수는 없을까?
지금까지의 대부분의 방법은 한 방향으로 동작한다.
- Bottom-up → 작은 프로그램부터 쌓아올림
- Top-down → 목표로부터 구조를 분해
각각 장점이 있지만,
단독으로 사용할 경우 명확한 한계를 가진다.
- Bottom-up → 너무 많은 후보 생성
- Top-down → 중간 상태를 평가하기 어려움
그래서 자연스럽게 다음 아이디어가 나온다.
두 방향을 동시에 사용하면 어떨까?
이 접근이 바로
Bidirectional Search
이다.
이 방식에서는
- Bottom-up으로 생성된 부분 프로그램과
- Top-down으로 요구되는 구조
를 중간에서 연결한다.
즉 탐색은 더 이상 한 방향이 아니라
두 방향에서 동시에 수렴하는 과정
이 된다.
이 글에서는 다음을 다룬다.
- Bottom-up과 Top-down의 한계
- Bidirectional Search의 핵심 아이디어
- 실제로 어떻게 연결되는지
- 왜 search space를 크게 줄일 수 있는지
Bottom-up vs Top-down — 왜 하나로는 부족한가
Bidirectional Search를 이해하려면
먼저 두 가지 기본 탐색 방식을 다시 살펴볼 필요가 있다.
Bottom-up — 작은 것부터 쌓아올리기
Bottom-up 방식은 가장 직관적인 접근이다.
- terminal부터 시작하고
- 점점 더 큰 프로그램을 생성한다
이 방식의 장점은 명확하다.
- 항상 실행 가능한 프로그램만 생성된다
- 구현이 단순하다
- 완전한 탐색이 가능하다
하지만 문제도 분명하다.
너무 많은 프로그램을 만든다
실제로 대부분의 후보는
- 의미 없는 조합이거나
- 문제와 전혀 관계없는 구조다
즉,
정답과 무관한 프로그램을 너무 많이 생성한다
Top-down — 목표로부터 분해하기
Top-down 방식은 반대 방향이다.
- 목표 output을 기준으로
- 가능한 프로그램 구조를 추론한다
이 접근의 장점은 다음과 같다.
- 불필요한 구조를 애초에 생성하지 않는다
- 문제에 맞는 형태만 고려한다
하지만 이 방식도 한계를 가진다.
중간 상태를 평가하기 어렵다
예를 들어:
1
E → Concat(E, E)
이 상태에서
- 어떤 E가 맞는지
- 어떤 선택이 좋은지
판단하기 어렵다.
즉,
search 방향은 좋지만, guidance가 부족하다
핵심 문제
두 방식을 비교하면 다음과 같다.
- Bottom-up → 많은 후보 + 정확한 평가
- Top-down → 적은 후보 + 평가 어려움
즉 각각은 서로의 약점을 그대로 가진다.
자연스러운 질문
이 시점에서 질문은 명확해진다.
Bottom-up의 “평가 가능성”과
Top-down의 “구조적 제한”을
동시에 사용할 수는 없을까?
이 질문이 바로 다음 단계로 이어진다.
두 탐색을 중간에서 연결하는 방법
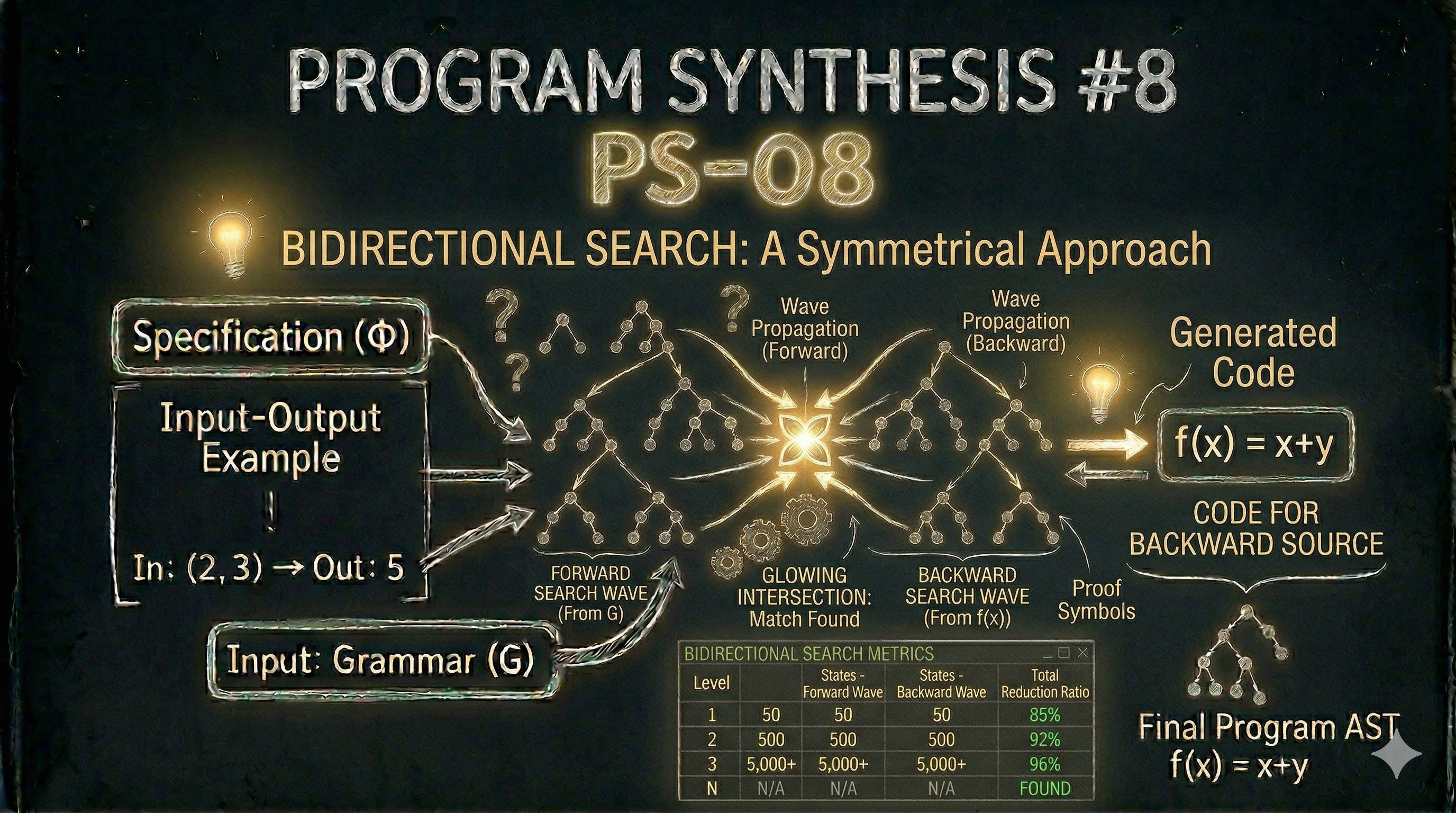
Bidirectional Search — 중간에서 만나는 탐색
앞에서 본 두 가지 접근은 각각 명확한 한계를 가진다.
- Bottom-up → 너무 많은 후보 생성
- Top-down → 중간 상태를 평가하기 어려움
Bidirectional Search는 이 두 문제를 동시에 해결하려는 시도다.
핵심 아이디어는 단순하다.
두 방향에서 탐색을 시작해서
중간에서 만나게 한다
Meet-in-the-middle
이 방식은 일반적인 탐색에서도 자주 등장한다.
- 시작점에서 forward search
- 목표에서 backward search
- 중간에서 두 결과를 연결
Program Synthesis에서도 동일한 구조를 사용한다.
- Bottom-up → 가능한 부분 프로그램 생성
- Top-down → 필요한 구조를 정의
그리고 이 둘이 “맞아떨어지는 지점”을 찾는다.
직관적인 예
다음 문제를 생각해보자.
문자열 “abc”를 만드는 프로그램
Top-down에서는 다음과 같이 생각한다.
1
Concat(E1, E2)
그리고 조건은:
- E1 + E2 = “abc”
즉 가능한 분해는 다음과 같다.
- (“a”, “bc”)
- (“ab”, “c”)
이건 Top-down이 제공하는 정보다.
어떤 구조가 가능한지
한편 Bottom-up에서는 다음을 생성한다.
- “a”
- “b”
- “c”
- “ab”
- “bc”
이건 Bottom-up이 제공하는 정보다.
어떤 부분 프로그램이 실제로 존재하는지
이제 핵심이 나온다.
- Top-down: (“a”, “bc”)
- Bottom-up: “a”, “bc” 존재
→ 연결 가능
즉,
두 탐색이 중간에서 만난다
구조적으로 보면
이 과정을 더 일반화하면 다음과 같다.
- Top-down → 요구사항을 subproblem으로 분해
- Bottom-up → 가능한 sub-solution 생성
- Matching → 두 결과를 연결
즉 탐색은 이렇게 바뀐다.
- 단방향 탐색 → 양방향 수렴
왜 효과적인가
이 방식이 강력한 이유는 명확하다.
Bottom-up은:
- 실제로 존재하는 프로그램만 제공하고
Top-down은:
- 필요한 구조만 제공한다
이 둘이 결합되면:
“필요하면서 동시에 존재하는 프로그램”만 고려한다
즉 search space는 다음처럼 줄어든다.
- 기존 → 전체 프로그램 공간
- 변경 → 구조와 일치하는 부분만
핵심 관점
Bidirectional Search는 단순한 최적화가 아니다.
탐색을 “필터링된 결합 과정”으로 바꾼다
이제 탐색은 더 이상
- 생성 → 검사
가 아니라
- 생성 (Bottom-up)
- 요구 (Top-down)
- 연결 (Match)
로 구성된다.
Bidirectional Search를 구현하는 방법
앞에서 Bidirectional Search의 핵심 아이디어를 살펴봤다.
이제 중요한 질문은 이것이다.
이걸 실제로 어떻게 구현할 수 있을까?
전체 구조
Bidirectional Search는 크게 세 단계로 구성된다.
- Bottom-up으로 부분 프로그램을 생성한다
- Top-down으로 요구되는 구조를 분해한다
- 두 결과를 매칭하여 결합한다
이 과정을 반복하면서 점점 더 큰 프로그램을 만든다.
핵심 데이터 구조
이 방식에서 중요한 것은 “중간 결과를 저장하는 방법”이다.
보통 다음과 같은 형태를 사용한다.
Bottom-up 테이블
각 값에 대해, 그 값을 생성할 수 있는 프로그램들을 저장한다.
예:
1
2
3
" a " → { "a" }
" b " → { "b" }
" ab " → { Concat("a","b") }
즉,
value → 프로그램 집합
이 구조는 매우 중요하다.
왜냐하면 Top-down에서 요구하는 값과 바로 매칭할 수 있기 때문이다.
Top-down 요구
Top-down은 목표를 분해한다.
예:
1
2
3
4
target = "abc"
→ Concat(E1, E2)
→ ("a", "bc"), ("ab", "c")
즉,
필요한 sub-value들을 생성한다
Matching 과정
이제 핵심 단계다.
Top-down에서 요구한 값이
Bottom-up에서 이미 생성된 값과 일치하는지 확인한다.
예:
- Top-down: (“a”, “bc”)
- Bottom-up: “a”, “bc” 존재
→ 결합 가능
이때 새로운 프로그램이 만들어진다.
1
Concat("a", "bc")
전체 알고리즘 흐름
이걸 정리하면 다음과 같다.
1
2
3
4
5
6
7
8
9
10
11
12
BottomUpTable = {}
while True:
expand bottom-up programs
propagate top-down constraints
for each subproblem:
if match found in BottomUpTable:
combine and build larger program
if solution found:
return program
중요한 최적화
이 구조에서 성능을 결정하는 요소는 다음과 같다.
1. Value-based pruning
같은 값을 만드는 프로그램은 하나로 묶는다.
→ observational equivalence와 연결됨
2. Early matching
Top-down 요구가 나오면
즉시 Bottom-up과 비교한다.
→ 불필요한 확장 방지
3. Memoization
이미 계산한 subproblem은 다시 계산하지 않는다.
→ 중복 제거
핵심 직관
이 알고리즘의 핵심은 다음이다.
- Bottom-up은 “가능한 것”을 제공하고
- Top-down은 “필요한 것”을 제공한다
그리고 두 조건을 동시에 만족하는 경우만 남는다.
가능하면서 동시에 필요한 프로그램
이 조건이 search space를 급격히 줄인다.
구조적으로 보면
Bidirectional Search는 다음과 같이 볼 수 있다.
- Enumeration → 후보 생성
- Constraint → 구조 제한
- Matching → 결합
즉 탐색은 더 이상 단순한 생성이 아니라
조건을 만족하는 조합을 찾는 과정
으로 바뀐다.
왜 Bidirectional Search는 빠른가
Bidirectional Search의 아이디어와 구현을 살펴봤다.
이제 중요한 질문이 남는다.
왜 이 방식이 실제로 그렇게 큰 성능 향상을 가져올까?
단방향 탐색의 비용
먼저 Bottom-up을 생각해보자.
프로그램의 크기를 \(d\)라고 하면,
가능한 프로그램의 수는 대략 다음과 같이 증가한다.
\[O(b^d)\]여기서 \(b\)는 branching factor다.
즉 depth가 조금만 증가해도
탐색 공간은 급격히 커진다.
Bidirectional의 핵심 아이디어
Bidirectional Search는 이 깊이를 반으로 나눈다.
- Bottom-up → depth \(d/2\)까지 탐색
- Top-down → depth \(d/2\)까지 분해
그리고 중간에서 연결한다.
복잡도 변화
이제 탐색 비용은 다음처럼 바뀐다.
- 기존: \(O(b^d)\)
- 변경: \(O(b^{d/2}) + O(b^{d/2})\)
즉,
\[O(b^d) \rightarrow O(b^{d/2})\]이 차이는 매우 크다.
예를 들어:
- \[b = 10\]
- \[d = 6\]
- 단방향: \(10^6 = 1,000,000\)
- 양방향: \(2 \cdot 10^3 = 2,000\)
거의 500배 이상 차이가 난다.
왜 가능한가
이게 가능한 이유는 다음과 같다.
Bidirectional Search는 단순히 탐색을 나누는 것이 아니다.
탐색 공간을 “조건 기반으로 분할”한다
- Bottom-up → 실제로 존재하는 프로그램만
- Top-down → 필요한 구조만
이 두 조건을 동시에 적용하면
고려해야 할 후보가 급격히 줄어든다
Matching의 역할
여기서 핵심은 Matching이다.
중간에서 두 탐색이 만나는 순간,
- 불필요한 경로는 제거되고
- 가능한 경로만 남는다
즉,
탐색은 더 이상 “확장”이 아니라
“필터링된 결합”이 된다
직관적으로 보면
단방향 탐색은 이런 구조다.
- 계속 확장
- 나중에 필터링
Bidirectional Search는 다르다.
- 확장 전에 필터링
- 필요한 부분만 확장
이 차이가 성능 차이를 만든다.
중요한 한계
물론 항상 좋은 것은 아니다.
- matching 비용이 클 수 있다
- representation이 없으면 효과가 제한적이다
- 문제에 따라 적용이 어려울 수 있다
즉 Bidirectional Search는
조건이 맞을 때 매우 강력한 전략
이다.
핵심 정리
- 탐색 깊이를 절반으로 줄인다
- 불필요한 후보를 초기에 제거한다
- 두 방향의 정보를 결합한다
이 세 가지가 결합되면서
탐색 성능이 크게 향상된다.
–
정리 — 탐색은 구조적으로 설계되어야 한다
지금까지 Bidirectional Search를 통해
두 방향에서 탐색을 결합하는 방법을 살펴봤다.
이 방식이 중요한 이유는 단순한 성능 향상 때문만은 아니다.
더 중요한 변화는 다음에 있다.
탐색을 더 이상 “한 방향으로 확장하는 과정”으로 보지 않는다
대신 탐색은 이렇게 재구성된다.
- Bottom-up → 가능한 부분 프로그램 생성
- Top-down → 필요한 구조 정의
- Matching → 두 조건을 동시에 만족하는 후보만 선택
이 구조는 지금까지 살펴본 여러 개념과 연결된다.
- Enumeration → 후보 생성
- Pruning → 불필요 제거
- Representation → 공간 압축
- Bidirectional → 탐색 방향 결합
즉 Program Synthesis는 점점 다음과 같은 형태로 발전해왔다.
단순한 생성 → 필터링 → 구조화된 탐색
이제 탐색은 더 이상 brute-force가 아니라
설계된 과정(designed process)
이다.
이 관점은 이후의 기법들을 이해하는 데 중요한 기반이 된다.
- 더 복잡한 search 전략
- 확률 기반 탐색과의 결합
- constraint와의 통합
다음 단계에서는 이 흐름을 이어서,
Stochastic Search
를 살펴본다.
탐색을 확률적으로 수행하여
local optimum을 넘어서고 더 넓은 공간을 탐색하는 방법이다.